< User talk:Paul WormerRevision as of 11:20, 29 March 2010 by imported>Paul Wormer
PD Image Equation for plane.
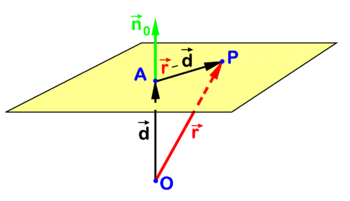
Analytic geometry knows several closely related algebraic equations for a plane in three-dimensional Euclidean space. One such equation is illustrated in the figure. Point X is an arbitrary point in the plane and O (the origin) is outside the plane. The point A in the plane is chosen such that vector

is orthogonal to the plane. The vector

is a unit (length 1) vector normal (perpendicular) to the plane. The following relation holds for an arbitrary point in the plane

Evidently a is the distance of O to the plane.
This equation for the plane can be rewritten in terms of coordinates with respect to a Cartesian frame with origin in O,

with

