imported>Chunbum Park |
imported>John Stephenson |
| (124 intermediate revisions by 5 users not shown) |
| Line 1: |
Line 1: |
| == '''[[ASIMO]]''' ==
| | {{:{{FeaturedArticleTitle}}}} |
| ----
| | <small> |
| {{Image|The New ASIMO.jpg|right|300px|The New ASIMO introduced in 2005.}} | | ==Footnotes== |
| '''ASIMO''' (アシモ ''ashimo'') is the world's most advanced [[humanoid]] robot, developed by the [[Japan]]ese company [[Honda]]. The first ASIMO was completed after 15 years of research, and it was officially unveiled on October 31, 2000. The robot resembles a small astronaut wearing a backpack, and is capable of performing a variety of tasks, including running, kicking a ball, walking up and down stairs, and recognizing people by their appearance and voice. The name is short for "'''A'''dvanced '''S'''tep in '''I'''nnovative '''MO'''bility" and is also known as an abbreviation of ''ashita no'' mobility, meaning 'mobility in the future.'<ref name="masatokenichi14">Masato, Hirose and Ogawa Kenichi, 2006. "Honda Humanoid Robots Development." pp. 14</ref> It was named in reference to [[Isaac Asimov]], an American professor and science fiction writer who is credited with coining the term ''robotics'' and proposing the [[Three Laws of Robotics]].
| |
| | |
| == Design concept ==
| |
| <blockquote>"Following in the steps of Honda motorcycles, cars and power products. Honda has taken up a new challenge in mobility - the development of a two-legged humanoid robot that can walk."<ref name="asimomain">"ASIMO Technology." ''Honda Worldwide''. Honda Motor Co.,Ltd. Web. 24 Aug. 2011. <http://world.honda.com/ASIMO/technology/>.</ref></blockquote>
| |
| | |
| Bipedal movement has been the primary focus of Honda's humanoid robotic research to create general-purpose, intelligent robots that can "coexist and cooperate with [[humans]]",<ref name=" ">Pfeiffer, Friedrich, and Hirochika Inoue, 2007. "Walking: Technology and Biology." pp. 5</ref> since it began in 1986 with the development of the 'E0' prototype. While there existed many different visions of futuristic robots, such as R2-D2 and C-3PO from [[Star Wars]], it was recognized that human-like robots with bipedal mobility are the most ideal for operating and [[human-robot interaction|interacting with humans]] in human surroundings.<ref name="masatokenichi11">Masato, Hirose and Ogawa Kenichi, 2006. "Honda Humanoid Robots Development." pp. 11</ref>
| |
| | |
| Based on this concept, ASIMO's design concerns three main elements, which are human-friendliness, adaptability to the human environment, and engineering feasibility. The robot's height was set at 120 cm (or 130 cm in the case of second-generation ASIMO), which is similar to a child's, as this would be practical both on the engineering aspect (since a smaller and lighter robot is less challenging than an adult-sized robot such as the P2 prototype) and the question of operability in the environment, where light switches are normally located 110 cm from the floor. With less bulk, the robot would be able to move more efficiently in handling obstacles and narrow passages,<ref name="masatokenichi15">Masato, Hirose and Ogawa Kenichi, 2006. "Honda Humanoid Robots Development." pp. 15</ref> and it would also be less overwhelming presence to humans and, in case of accidents, less hazardous.
| |
| {{Image|ASIMO reservation system.jpg|left|250px|The New ASIMO serving refreshments.}} | |
| | |
| Its humanoid form that is not only functionally but also proportionally similar to the [[human anatomy|human body]] was meant to enhance its human and environment-friendly qualities by allowing it to make gestures and communicate face-to-face, as well as using the stairs or taking seat in a car. Its strikingly minimalist appearance, which lacks a detailed face and toes on its feet, provides fewer moving parts as rooms for error, while being clearly discernible to humans as consisting of a head, torso, arms, hands, legs, and feet. ASIMO being a popular icon, its design has contributed to the conceptual diversity of futuristic robots, based on a very unique design language of modern Japanese aesthetics.<ref name="aestheticsmansfield">Mansfield, Stephen. "Japanese Aesthetics and High-Tech Design." Nov. 2001. ''J@pan Inc''. Japan Inc Communications, Inc. Web. 10 Oct. 2011. <http://www.japaninc.com/article.php?articleID=515>.</ref>
| |
| | |
| Honda has suggested several future uses for robots like the ASIMO, which, despite its impressive list of feats and features, remains an experimental technology demonstrator that needs to operate in controlled, predictable environment. With further advances, ASIMO could be engaged in useful tasks such as elderly care assistance, [[firefighting]], and toxic cleanup.<ref name="asimotechguide18">"ASIMO Technical Guide". pp. 18</ref> At the present, the ASIMO is being leased to companies for receptionist work.<ref name="sakagamietal2478">Sakagami, et al, 2002. ''The Intelligent ASIMO: System Overview and Integration''. pp. 2478</ref>
| |
| | |
| ''[[ASIMO|.... (read more)]]''
| |
| | |
| {| class="wikitable collapsible collapsed" style="width: 90%; float: center; margin: 0.5em 1em 0.8em 0px;"
| |
| |-
| |
| ! style="text-align: center;" | [[ASIMO#notes|notes]]
| |
| |-
| |
| |
| |
| {{reflist|2}} | | {{reflist|2}} |
| |}
| | </small> |
After decades of failure to slow the rising global consumption of coal, oil and gas,[1] many countries have proceeded as of 2024 to reconsider nuclear power in order to lower the demand for fossil fuels.[2] Wind and solar power alone, without large-scale storage for these intermittent sources, are unlikely to meet the world's needs for reliable energy.[3][4][5] See Figures 1 and 2 on the magnitude of the world energy challenge.
Nuclear power plants that use nuclear reactors to create electricity could provide the abundant, zero-carbon, dispatchable[6] energy needed for a low-carbon future, but not by simply building more of what we already have. New innovative designs for nuclear reactors are needed to avoid the problems of the past.
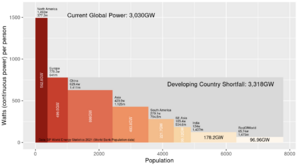
(CC) Image: Geoff Russell Fig.1 Electricity consumption may soon double, mostly from coal-fired power plants in the developing world.
[7] Issues Confronting the Nuclear Industry
New reactor designers have sought to address issues that have prevented the acceptance of nuclear power, including safety, waste management, weapons proliferation, and cost. This article will summarize the questions that have been raised and the criteria that have been established for evaluating these designs. Answers to these questions will be provided by the designers of these reactors in the articles on their designs. Further debate will be provided in the Discussion and the Debate Guide pages of those articles.
- ↑ Global Energy Growth by Our World In Data
- ↑ Public figures who have reconsidered their stance on nuclear power are listed on the External Links tab of this article.
- ↑ Pumped storage is currently the most economical way to store electricity, but it requires a large reservoir on a nearby hill or in an abandoned mine. Li-ion battery systems at $500 per KWh are not practical for utility-scale storage. See Energy Storage for a summary of other alternatives.
- ↑ Utilities that include wind and solar power in their grid must have non-intermittent generating capacity (typically fossil fuels) to handle maximum demand for several days. They can save on fuel, but the cost of the plant is the same with or without intermittent sources.
- ↑ Mark Jacobson believes that long-distance transmission lines can provide an alternative to costly storage. See the bibliography for more on this proposal and the critique by Christopher Clack.
- ↑ "Load following" is the term used by utilities, and is important when there is a lot of wind and solar on the grid. Some reactors are not able to do this.
- ↑ Fig.1.3 in Devanney "Why Nuclear Power has been a Flop"
