imported>John R. Brews |
|
| (162 intermediate revisions by one other user not shown) |
| Line 1: |
Line 1: |
| A '''frame of reference''' in [[physics]], may refer to a ''[[coordinate system]]'' or [[Cartesian coordinate system|set of axes]] within which to measure the position, [[orientation (geometry)|orientation]], and other properties of objects in it, or it may refer to an ''observational reference frame'' tied to the state of motion of an [[Observer (special relativity)|observer]].
| | {{AccountNotLive}} |
| It may also refer to both an observational reference frame and an attached coordinate system, as a unit.
| | {{TOC|right}} |
| | [[Image:Current division example.svg|thumbnail|250px|Figure 1: Schematic of an electrical circuit illustrating current division. Notation ''R<sub>T<sub>.</sub></sub>'' refers to the ''total'' resistance of the circuit to the right of resistor ''R<sub>X</sub>''.]] |
|
| |
|
| ==Different aspects of "frame of reference"==
| | In [[electronics]], a '''current divider ''' is a simple [[linear]] [[Electrical network|circuit]] that produces an output [[Electric current|current]] (''I''<sub>X</sub>) that is a fraction of its input current (''I''<sub>T</sub>). The splitting of current between the branches of the divider is called '''current division'''. The currents in the various branches of such a circuit divide in such a way as to minimize the total energy expended. |
|
| |
|
| The need to distinguish between the various meanings of "frame of reference" has led to a variety of terms. For example, sometimes the type of coordinate system is attached as a modifier, as in ''Cartesian frame of reference''. Sometimes the state of motion is emphasized, as in ''[[Rotating reference frame|rotating frame of reference]]''. Sometimes the way it transforms to frames considered as related is emphasized as in ''Galilean frame of reference''. Sometimes frames are distinguished by the scale of their observations, as in ''macroscopic'' and ''microscopic frames of reference''.<ref name=macroscopic>The distinction between macroscopic and microscopic frames shows up, for example, in electromagnetism where [[Constitutive equation|constitutive relations]] of various time and length scales are used to determine the current and charge densities entering [[Maxwell's equations]]. See, for example, {{cite book |title=Electromagnetic and Optical Pulse Propagation 1: Spectral Representations in Temporally Dispersive Media |author=Kurt Edmund Oughstun |pages=p. 165 |url=http://books.google.com/books?id=behRnNRiueAC&pg=PA165&dq=macroscopic+frame++electromagnetism&lr=&as_brr=0&sig=ACfU3U3J6a2ZwvTOx7T3S6Zunptf9E9nxQ | | The formula describing a current divider is similar in form to that for the [[voltage divider]]. However, the ratio describing current division places the impedance of the unconsidered branches in the [[numerator]], unlike voltage division where the considered impedance is in the numerator. To be specific, if two or more [[Electrical impedance|impedance]]s are in parallel, the current that enters the combination will be split between them in inverse proportion to their impedances (according to [[Ohm's law]]). It also follows that if the impedances have the same value the current is split equally. |
| |isbn=038734599X |year=2006 |publisher=Springer }}. These distinctions also appear in thermodynamics. See {{cite book |title=Classical Theory |author=Paul McEvoy |pages=p. 205 |url=http://books.google.com/books?id=dj0wFIxn-PoC&pg=PA206&dq=macroscopic+frame&lr=&as_brr=0&sig=ACfU3U2JFNgXVpz6Ew6hmp2rmdL6p9O7Ng#PPA205,M1
| |
| |isbn=1930832028 |year=2002 |publisher=MicroAnalytix }}.</ref>
| |
|
| |
|
| In this article the term ''observational frame of reference'' is used when emphasis is upon the ''state of motion'' rather than upon the coordinate choice or the character of the observations or observational apparatus. In this sense, an observational frame of reference allows study of the effect of motion upon an entire family of coordinate systems that could be attached to this frame. On the other hand, a ''coordinate system'' may be employed for many purposes where the state of motion is not the primary concern. For example, a coordinate system may be adopted to take advantage of the symmetry of a system. In a still broader perspective, of course, the formulation of many problems in physics employs ''[[generalized coordinates]]'', ''[[normal modes]]'' or ''[[eigenvectors]]'', which are only indirectly related to space and time. It seems useful to divorce the various aspects of a reference frame for the discussion below. We therefore take observational frames of reference, coordinate systems, and observational equipment as independent concepts, separated as below:
| | ==Resistive divider== |
| | A general formula for the current ''I<sub>X</sub>'' in a resistor ''R<sub>X</sub>'' that is in parallel with a combination of other resistors of total resistance ''R<sub>T</sub>'' is (see Figure 1): |
| | :<math>I_X = \frac{R_T}{R_X+R_T}I_T \ </math> |
| | where ''I<sub>T</sub>'' is the total current entering the combined network of ''R<sub>X</sub>'' in parallel with ''R<sub>T</sub>''. Notice that when ''R<sub>T</sub>'' is composed of a [[Series_and_parallel_circuits#Parallel_circuits|parallel combination]] of resistors, say ''R<sub>1</sub>'', ''R<sub>2</sub>'', ... ''etc.'', then the reciprocal of each resistor must be added to find the total resistance ''R<sub>T</sub>'': |
| | :<math> \frac {1}{R_T} = \frac {1} {R_1} + \frac {1} {R_2} + \frac {1}{R_3} + ... \ . </math> |
|
| |
|
| *An observational frame (such as an [[inertial frame]] or [[non-inertial frame of reference]]) is a physical concept related to state of motion.
| | ==General case== |
| | Although the resistive divider is most common, the current divider may be made of frequency dependent [[Electrical impedance|impedance]]s. In the general case the current I<sub>X</sub> is given by: |
| | :<math>I_X = \frac{Z_T} {Z_X+Z_T}I_T \ ,</math> |
|
| |
|
| *A coordinate system is a mathematical concept, amounting to a choice of language used to describe observations.<ref name =Pontriagin>
| | ==Using Admittance== |
| | Instead of using [[Electrical impedance|impedance]]s, the current divider rule can be applied just like the [[voltage divider]] rule if [[admittance]] (the inverse of impedance) is used. |
| | :<math>I_X = \frac{Y_X} {Y_{Total}}I_T</math> |
| | Take care to note that Y<sub>Total</sub> is a straightforward addition, not the sum of the inverses inverted (as you would do for a standard parallel resistive network). For Figure 1, the current I<sub>X</sub> would be |
| | :<math>I_X = \frac{Y_X} {Y_{Total}}I_T = \frac{\frac{1}{R_X}} {\frac{1}{R_X} + \frac{1}{R_1} + \frac{1}{R_2} + \frac{1}{R_3}}I_T</math> |
|
| |
|
| In very general terms, a coordinate system is a set of arcs ''x''<sup>i</sup> = ''x''<sup>i</sup> (''t'') in a complex [[Lie group]]; see {{cite book |author=Lev Semenovich Pontri͡agin |title=L.S. Pontryagin: Selected Works Vol. 2: Topological Groups |pages= p. 429 |year= |url=http://books.google.com/books?id=JU0DT_wXu2oC&pg=PA429&dq=algebra+%22coordinate+system%22&lr=&as_brr=0&sig=ACfU3U07j7JfzfwMigYTa2iDVygAb0WKCA
| | ===Example: RC combination=== |
| |isbn=2881241336 |publisher=Gordon and Breach|edition=3rd ed }}. Less abstractly, a coordinate system in a space of n-dimensions is defined in terms of a basis set of vectors {'''e'''<sub>1</sub>, '''e'''<sub>2</sub>,… '''e'''<sub>n</sub>}; see {{cite book |title=Linear Algebra: A Geometric Approach |author= Edoardo Sernesi, J. Montaldi |pages=p. 95 |url=http://books.google.com/books?id=1dZOuFo1QYMC&pg=PA95&dq=algebra+%22coordinate+system%22&lr=&as_brr=0&sig=ACfU3U1TD6WmY73w4hEYlVFcXK5NxtKSDQ | | [[Image:Low pass RC filter.PNG|thumbnail|220px|Figure 2: A low pass RC current divider]] |
| |isbn=0412406802 |year=1993 |publisher=CRC Press }} As such, the coordinate system is a mathematical construct, a language, that may be related to motion, but has no necessary connection to motion.
| | Figure 2 shows a simple current divider made up of a [[capacitor]] and a resistor. Using the formula above, the current in the resistor is given by: |
|
| |
|
| </ref> Consequently, an observer in an observational frame of reference can choose to employ any coordinate system (Cartesian, polar, curvilinear, generalized, …) to describe observations made from that frame of reference. A change in the choice of this coordinate system does not change an observer's state of motion, and so does not entail a change in the observer's ''observational'' frame of reference. This viewpoint can be found elsewhere as well.<ref name=Johansson> | | ::<math> I_R = \frac {\frac{1}{j \omega C}} {R + \frac{1}{j \omega C} }I_T </math> |
| {{cite book |title=Unification of Classical, Quantum and Relativistic Mechanics and of the Four Forces |author=J X Zheng-Johansson and Per-Ivar Johansson | | :::<math> = \frac {1} {1+j \omega CR} I_T \ , </math> |
| |pages=p. 13
| | where ''Z<sub>C</sub> = 1/(jωC) '' is the impedance of the capacitor. |
| |url=http://books.google.com/books?id=I1FU37uru6QC&pg=PA13&dq=frame+coordinate+johansson&lr=&as_brr=0&sig=ACfU3U1VAkGbfRjt_GTknoX6WRLWP-AVZw
| |
| |isbn=1594542600
| |
| |publisher=Nova Publishers
| |
| |year=2006 }}</ref> Which is not to dispute that some coordinate systems may be a better choice for some observations than are others.
| |
|
| |
|
| *Choice of what to measure and with what observational apparatus is a matter separate from the observer's state of motion and choice of coordinate system.
| | The product ''τ = CR'' is known as the [[time constant]] of the circuit, and the frequency for which ωCR = 1 is called the [[corner frequency]] of the circuit. Because the capacitor has zero impedance at high frequencies and infinite impedance at low frequencies, the current in the resistor remains at its DC value ''I<sub>T</sub>'' for frequencies up to the corner frequency, whereupon it drops toward zero for higher frequencies as the capacitor effectively [[short-circuit]]s the resistor. In other words, the current divider is a [[low pass filter]] for current in the resistor. |
|
| |
|
| Here is a quotation applicable to moving observational frames <math>\mathfrak{R}</math> and various associated Euclidean three-space coordinate systems [''R'', ''R' '', ''etc.'']:
| | ==Loading effect== |
| <ref name=Lyle >{{cite book |title=Handbook of Continuum Mechanics: General Concepts, Thermoelasticity |pages= p. 9 |author=Jean Salençon, Stephen Lyle |url=http://books.google.com/books?id=H3xIED8ctfUC&pg=PA9&dq=physical+%22frame+of+reference%22&lr=&as_brr=0&sig=ACfU3U1tEWQICZdsXeuLyfmH2PoLgZnMGA
| | [[Image:Current division.PNG|thumbnail|300px|Figure 3: A current amplifier (gray box) driven by a Norton source (''i<sub>S</sub>'', ''R<sub>S</sub>'') and with a resistor load ''R<sub>L</sub>''. Current divider in blue box at input (''R<sub>S</sub>'',''R<sub>in</sub>'') reduces the current gain, as does the current divider in green box at the output (''R<sub>out</sub>'',''R<sub>L</sub>'')]] |
| |isbn=3540414436 |year=2001 |publisher=Springer }}</ref>
| | The gain of an amplifier generally depends on its source and load terminations. Current amplifiers and transconductance amplifiers are characterized by a short-circuit output condition, and current amplifiers and transresistance amplifiers are characterized using ideal infinite impedance current sources. When an amplifier is terminated by a finite, non-zero termination, and/or driven by a non-ideal source, the effective gain is reduced due to the '''loading effect''' at the output and/or the input, which can be understood in terms of current division. |
|
| |
|
| {{Cquote|We first introduce the notion of ''reference frame'', itself related to the idea of ''observer'': the reference frame is, in some sense, the "Euclidean space carried by the observer". Let us give a more mathematical definition:… the reference frame is... the set of all points in the Euclidean space with the rigid body motion of the observer. The frame, denoted <math>\mathfrak{R}</math>, is said to move with the observer.… The spatial positions of particles are labelled relative to a frame <math>\mathfrak{R}</math> by establishing a ''coordinate system'' ''R'' with origin ''O''. The corresponding set of axes, sharing the rigid body motion of the frame <math>\mathfrak{R}</math>, can be considered to give a physical realization of <math>\mathfrak{R}</math>. In a frame <math>\mathfrak{R}</math>, coordinates are changed from ''R'' to ''R''' by carrying out, at each instant of time, the same coordinate transformation on the components of ''intrinsic'' objects (vectors and tensors) introduced to represent physical quantities ''in this frame''.| Jean Salençon, Stephen Lyle ''Handbook of Continuum Mechanics: General Concepts, Thermoelasticity''}}
| | Figure 3 shows a current amplifier example. The amplifier (gray box) has input resistance ''R<sub>in</sub>'' and output resistance ''R<sub>out</sub>'' and an ideal current gain ''A<sub>i</sub>''. With an ideal current driver (infinite Norton resistance) all the source current ''i<sub>S</sub>'' becomes input current to the amplifier. However, for a [[Norton's theorem|Norton driver]] a current divider is formed at the input that reduces the input current to |
| and this on the utility of separating the notions of <math>\mathfrak{R}</math> and [''R'', ''R' '', ''etc.'']:<ref name= Lakhtakia>{{cite book |title=Essays on the Formal Aspects of Electromagnetic Theory |author=Patrick Cornille |editor=Akhlesh Lakhtakia., ed |pages=p. 149 |url=http://books.google.com/books?id=qsOBhKVM1qYC&pg=PA149&dq=coordinate+system+%22reference+frame%22&lr=&as_brr=0&sig=ACfU3U0xhpZ2lI99UPiYQCOL6oJ0ALO5uA
| |
| |isbn=9810208545 |year=1993 |publisher=World Scientific }}</ref>
| |
| {{Cquote|As noted by Brillouin, a distinction between mathematical sets of coordinates and physical frames of reference must be made. The ignorance of such distinction is the source of much confusion… the dependent functions such as velocity for example, are measured with respect to a physical reference frame, but one is free to choose any mathematical coordinate system in which the equations are specified.|L. Brillouin in ''Relativity Reexamined'' (quoted by Patrick Cornille) }}
| |
| and this, also on the distinction between <math>\mathfrak{R}</math> and [''R'', ''R' '', ''etc.'']:<ref name= Nerlich>{{cite book |title=What Spacetime Explains: Metaphysical essays on space and time |author=Graham Nerlich |pages=p. 64 |url=http://books.google.com/books?id=fKK7rKOpc7AC&pg=PA64&dq=%22idea+of+a+reference+frame%22&lr=&as_brr=0&sig=ACfU3U2wsO42pqLOJ453eeIzk7ztXTa6uQ
| |
| |isbn=0521452619 |year=1994 |publisher=Cambridge University Press}}</ref>
| |
|
| |
|
| {{Cquote|The idea of a reference frame is really quite different from that of a coordinate system. Frames differ just when they define different ''spaces'' (sets of ''rest'' points) or times (sets of simultaneous events). So the ideas of a space, a time, of rest and simultaneity, go inextricably together with that of frame. However, a mere shift of origin, or a purely spatial rotation of space coordinates results in a new coordinate system. So frames correspond at best to ''classes'' of coordinate systems.|Graham Nerlich: ''What Spacetime Explains''}} | | ::<math>i_{i} = \frac {R_S} {R_S+R_{in}} i_S \ , </math> |
|
| |
|
| and from J. D. Norton:<ref name=Norton>
| | which clearly is less than ''i<sub>S</sub>''. Likewise, for a short circuit at the output, the amplifier delivers an output current ''i<sub>o</sub>'' = ''A<sub>i</sub> i<sub>i</sub>'' to the short-circuit. However, when the load is a non-zero resistor ''R<sub>L</sub>'', the current delivered to the load is reduced by current division to the value: |
|
| |
|
| {{cite journal |journal=Rep. Prog. Phys.|author=John D. Norton |year=1993 |volume=vol. 56 |pages=pp. 835-837 |title=General covariance and the foundations of general relativity: eight decades of dispute |url=http://www.pitt.edu/~jdnorton/papers/decades.pdf}} | | ::<math>i_L = \frac {R_{out}} {R_{out}+R_{L}} A_i i_{i} \ . </math> |
|
| |
|
| </ref> | | Combining these results, the ideal current gain ''A<sub>i</sub>'' realized with an ideal driver and a short-circuit load is reduced to the '''loaded gain''' ''A<sub>loaded</sub>'': |
|
| |
|
| {{Cquote|In traditional developments of special and general relativity it has been customary not to distinguish between two quite distinct ideas. The first is the notion of a coordinate system, understood simply as the smooth, invertible assignment of four numbers to events in spacetime neighborhoods. The second, the frame of reference, refers to an idealized system used to assign such numbers … To avoid unnecessary restrictions, we can divorce this arrangement from metrical notions. … Of special importance for our purposes is that each frame of reference has a definite state of motion at each event of spacetime.…Within the context of special relativity and as long as we restrict ourselves to frames of reference in inertial motion, then little of importance depends on the difference between an inertial frame of reference and the inertial coordinate system it induces. This comfortable circumstance ceases immediately once we begin to consider frames of reference in nonuniform motion even within special relativity.…More recently, to negotiate the obvious ambiguities of Einstein’s treatment, the notion of frame of reference has reappeared as a structure distinct from a coordinate system.|John D. Norton: ''General Covariance and the Foundations of General Relativity}} | | ::<math>A_{loaded} =\frac {i_L} {i_S} = \frac {R_S} {R_S+R_{in}}</math> <math> \frac {R_{out}} {R_{out}+R_{L}} A_i \ . </math> |
|
| |
|
| The discussion is taken beyond simple space-time coordinate systems by Brading and Castellani.<ref name=Brading> | | The resistor ratios in the above expression are called the '''loading factors'''. For more discussion of loading in other amplifier types, see [[Voltage division#Loading effect|loading effect]]. |
|
| |
|
| {{cite book |title=Symmetries in Physics: Philosophical Reflections |author=Katherine Brading & Elena Castellani |pages=p. 417 |url=http://books.google.com/books?id=SnmBN64cAdYC&pg=PA417&dq=%22idea+of+a+reference+frame%22&lr=&as_brr=0&sig=ACfU3U1PdXJdmFyMRiDb7xPDAI_dy9MgJg |isbn=0521821371 |year=2003 |publisher=Cambridge University Press}}
| | ===Unilateral versus bilateral amplifiers=== |
| | [[Image:H-parameter current amplifier.PNG|thumbnail|300px|Figure 4: Current amplifier as a bilateral two-port network; feedback through dependent voltage source of gain β V/V]] |
| | Figure 3 and the associated discussion refers to a [[Electronic amplifier#Unilateral or bilateral|unilateral]] amplifier. In a more general case where the amplifier is represented by a [[two-port network|two port]], the input resistance of the amplifier depends on its load, and the output resistance on the source impedance. The loading factors in these cases must employ the true amplifier impedances including these bilateral effects. For example, taking the unilateral current amplifier of Figure 3, the corresponding bilateral two-port network is shown in Figure 4 based upon [[Two-port network#Hybrid parameters (h-parameters)| h-parameters]].<ref name=H_port/> Carrying out the analysis for this circuit, the current gain with feedback ''A<sub>fb</sub>'' is found to be |
|
| |
|
| </ref> Extension to coordinate systems using generalized coordinates underlies the [[Hamilton's principle|Hamiltonian]] and [[Lagrangian]] formulations<ref name=Johns> | | ::<math> A_{fb} = \frac {i_L}{i_S} = \frac {A_{loaded}} {1+ {\beta}(R_L/R_S) A_{loaded}} \ . </math> |
|
| |
|
| {{cite book |title=Analytical Mechanics for Relativity and Quantum Mechanics |pages=Chapter 16 |author=Oliver Davis Johns |url=http://books.google.com/books?id=PNuM9YDN8CIC&pg=PA318&dq=coordinate+observer&lr=&as_brr=0&sig=ACfU3U3TRrg4EVCiIW8btVgFdR49PD9RUg#PPA276,M1
| | That is, the ideal current gain ''A<sub>i</sub>'' is reduced not only by the loading factors, but due to the bilateral nature of the two-port by an additional factor<ref>Often called the ''improvement factor'' or the ''desensitivity factor''.</ref> ( 1 + β (R<sub>L</sub> / R<sub>S</sub> ) A<sub>loaded</sub> ), which is typical of [[negative feedback amplifier]] circuits. The factor β (R<sub>L</sub> / R<sub>S</sub> ) is the current feedback provided by the voltage feedback source of voltage gain β V/V. For instance, for an ideal current source with ''R<sub>S</sub>'' = ∞ Ω, the voltage feedback has no influence, and for ''R<sub>L</sub>'' = 0 Ω, there is zero load voltage, again disabling the feedback. |
| |isbn=019856726X |year=2005 |publisher=Oxford University Press |nopp=true }}
| |
|
| |
|
| </ref> of [[quantum field theory]], [[classical mechanics|classical relativistic mechanics]], and [[quantum gravity]].<ref name=Greenwood>
| | ==References and notes== |
| | {{reflist|refs= |
|
| |
|
| {{cite book |title=Classical dynamics |author=Donald T Greenwood |pages=p. 313 |year=1997 |edition=Reprint of 1977 Prentice-Hall ed |publisher=Courier Dover Publications |url=http://books.google.com/books?id=x7rj83I98yMC&pg=RA2-PA314&dq=%22relativistic+%22+Lagrangian+OR+Hamiltonian&lr=&as_brr=0&sig=ACfU3U3l7hGibLCCG40qWuiO3A5sN7E7lg#PRA2-PA313,M1
| | <ref name=H_port>>The [[Two-port network#Hybrid parameters (h-parameters)|h-parameter two port]] is the only two-port among the four standard choices that has a current-controlled current source on the output side.</ref> |
| |isbn=0486696901 }}
| |
|
| |
|
| </ref><ref name=Trump>
| | }} |
| | |
| {{cite book |title=Classical Relativistic Many-Body Dynamics |author=Matthew A. Trump & W. C. Schieve |pages= p. 99 |url=http://books.google.com/books?id=g2yfLOp0IzwC&pg=PA99&dq=relativity+%22generalized+coordinates%22&lr=&as_brr=0&sig=ACfU3U230ux_i1Ov3QHf_xy1dAA_oLSKpw#PPA99,M1
| |
| |year=1999 |publisher=Springer |isbn= 079235737X }}
| |
| | |
| </ref><ref name=Kompaneyets>
| |
| | |
| {{cite book |author=A S Kompaneyets |title=Theoretical Physics |url=http://books.google.com/books?id=CQ2gBrL5T4YC&pg=PA118&dq=relativity+%22generalized+coordinates%22&lr=&as_brr=0&sig=ACfU3U3OOAmAAh2wV46vG0gUN0wSIPiIww
| |
| |pages=p. 118 |isbn=0486495329 |year=2003 |publisher=Courier Dover Publications |edition=Reprint of 2nd 1962 ed }}</ref><ref name=Srednicki>{{cite book |title=Quantum Field Theory |pages= Chapter 4|author=M Srednicki |publisher=Cambridge University Press |year=2007 |isbn=978-0-521-86449-7 |url=http://books.google.com/books?id=5OepxIG42B4C&pg=PA266&dq=isbn=9780521864497&sig=ACfU3U2J9PylxA2eptc48_TBT2u2GPfnVA#PPA31,M1 |nopp=true }}
| |
| | |
| </ref><ref name=Rovelli>
| |
| | |
| {{cite book |title=Quantum Gravity |author=Carlo Rovelli |pages= pp. 98 ''ff'' |url=http://books.google.com/books?id=HrAzTmXdssQC&pg=PA179&dq=%22relativistic+%22+Lagrangian+OR+Hamiltonian&lr=&as_brr=0&sig=ACfU3U3TLyr3CXsHYKFUGDe1dpq5ZWm_kg#PPA98,M1
| |
| |isbn=0521837332 |year=2004 |publisher=Cambridge University Press }}</ref>
| |
| | |
| ===Coordinate systems===
| |
| | |
| Although the term "coordinate system" is often used (particularly by physicists) in a nontechnical sense, the term "coordinate system" does have a precise meaning in mathematics, and sometimes that is what the physicist means as well.
| |
| | |
| A coordinate system in mathematics is a facet of [[geometry]] or of [[algebra]],<ref name=Barker>{{cite book |title=Continuous symmetry: from Euclid to Klein |author=William Barker & Roger Howe |pages=pp. 18 ''ff'' |url=http://books.google.com/books?id=NIxExnr2EjYC&pg=PA17&dq=geometry++axiom+%22coordinate+system%22&lr=&as_brr=0&sig=ACfU3U1-Tq9AjjikB_HSYJ1Xn0fFdHWY0g#PPA18,M1
| |
| |isbn=0821839004 |year=2008 |publisher=American Mathematical Society }}</ref><ref name=Ramsay>{{cite book |title=Introduction to Hyperbolic Geometry |author=Arlan Ramsay & Robert D. Richtmyer |pages=p. 11 |url=http://books.google.com/books?id=UVozmKVh7GsC&pg=PA202&dq=geometry++axiom+%22coordinate+system%22&lr=&as_brr=0&sig=ACfU3U0Nr0kKmV8XtorU41jRiiEo2wil3Q#PPA11,M1
| |
| |isbn=0387943390 |publisher=Springer |year=1995 }}</ref> in particular, a property of [[manifold]]s (for example, in physics, [[configuration space]]s or [[phase space]]s).<ref name=Hawking>According to Hawking and Ellis: "A manifold is a space locally similar to Euclidean space in that it can be covered by coordinate patches. This structure allows differentiation to be defined, but does not distinguish between different coordinate systems. Thus, the only concepts defined by the manifold structure are those that are independent of the choice of a coordinate system." {{cite book |title=The Large Scale Structure of Space-Time |author=Stephen W. Hawking & George Francis Rayner Ellis |isbn=0521099064 |year=1973 |publisher=Cambridge University Press |pages=p. 11 |url=http://books.google.com/books?id=QagG_KI7Ll8C&pg=PA59&dq=manifold+%22The+Large+Scale+Structure+of+Space-Time%22&lr=&as_brr=0&sig=ACfU3U1q-iaRTBDo6J8HMEsyPeFi8cJNWg#PPA11,M1
| |
| }} A mathematical definition is: ''A connected [[Hausdorff space]] ''M'' is called an ''n''-dimensional manifold if each point of ''M'' is contained in an open set that is homeomorphic to an open set in Euclidean ''n''-dimensional space.''</ref><ref name=Morita>{{cite book |title=Geometry of Differential Forms |author=Shigeyuki Morita, Teruko Nagase, Katsumi Nomizu |pages=p. 12 |url=http://books.google.com/books?id=5N33Of2RzjsC&pg=PA12&dq=geometry++axiom+%22coordinate+system%22&lr=&as_brr=0&sig=ACfU3U3Vi7xsLiYiWCK0erF6X2gczHOkJA#PPA12,M1
| |
| |isbn=0821810456 |year=2001 |publisher=American Mathematical Society Bookstore }}</ref> The [[Cartesian coordinate system|coordinates]] of a point '''r''' in an ''n''-dimensional space are simply an ordered set of ''n'' numbers:<ref name=Korn>{{cite book |title=Mathematical handbook for scientists and engineers : definitions, theorems, and formulas for reference and review |author=Granino Arthur Korn, Theresa M. Korn |pages=p. 169 |url=http://books.google.com/books?id=xHNd5zCXt-EC&pg=PA169&dq=curvilinear+%22coordinate+system%22&lr=&as_brr=0&sig=ACfU3U3psSqwpBtA3U40e46VPPaMNMEw4g#PPA169,M1
| |
| |isbn=0486411478 |year=2000 |publisher=Courier Dover Publications}}</ref><ref name=encarta>See [http://encarta.msn.com/encyclopedia_761579532/Coordinate_System_(mathematics).html Encarta definition]. [http://www.webcitation.org/5kwcKb20f Archived] 2009-10-31.</ref>
| |
| :<math>\mathbf{r} =[x^1,\ x^2,\ \dots\ , x^n] \ .</math>
| |
| In a general [[Banach space]], these numbers could be (for example) coefficients in a functional expansion like a [[Fourier series]]. In a physical problem, they could be [[spacetime]] coordinates or [[normal mode]] amplitudes. In a [[Robotics|robot design]], they could be angles of relative rotations, linear displacements, or deformations of [[linkage (mechanical)|joints]].<ref name=Yamane>{{cite book |author=Katsu Yamane |title=Simulating and Generating Motions of Human Figures |isbn=3540203176 |year=2004 |publisher=Springer |pages=12–13 |url=http://books.google.com/books?id=tNrMiIx3fToC&pg=PA12&dq=generalized+coordinates+%22kinematic+chain%22&lr=&as_brr=0&sig=ACfU3U3LRGJJTAHs21CHdOvuu08vw0cAuw#PPA13,M1 }}</ref> Here we will suppose these coordinates can be related to a [[Cartesian coordinate]] system by a set of functions:
| |
| :<math>x^j = x^j (x,\ y,\ z,\ \dots)\ , </math>    <math> j = 1, \ \dots \ , \ n\ </math>
| |
| | |
| where ''x'', ''y'', ''z'', ''etc.'' are the ''n'' Cartesian coordinates of the point. Given these functions, '''coordinate surfaces''' are defined by the relations:
| |
| :<math> x^j (x, y, z, \dots) = \mathrm{constant}\ , </math>    <math> j = 1, \ \dots \ , \ n\ .</math>
| |
| The intersection of these surfaces define '''coordinate lines'''. At any selected point, tangents to the intersecting coordinate lines at that point define a set of '''basis vectors''' {'''e'''<sub>1</sub>, '''e'''<sub>2</sub>, …, '''e'''<sub>n</sub>} at that point. That is:<ref name=Papapetrou>{{cite book |title=Lectures on General Relativity |author=Achilleus Papapetrou |page=5 |url=http://books.google.com/books?id=SWeOggyp1ZsC&pg=PA3&dq=relativistic++%22general+coordinates%22&lr=&as_brr=0&sig=ACfU3U3sPmqPV3oEzbV5zHqErtZrqcx4bg#PPA5,M1
| |
| |isbn=9027705402 |year=1974 |publisher=Springer }}</ref>
| |
| | |
| :<math>\mathbf{e}_i(\mathbf{r}) =\lim_{\epsilon \rightarrow 0} \frac{\mathbf{r}\left(x^1,\ \dots,\ x^i+\epsilon,\ \dots ,\ x^n \right) - \mathbf{r}\left(x^1,\ \dots,\ x^i,\ \dots ,\ x^n \right)}{\epsilon }\ ,</math>
| |
| | |
| which can be normalized to be of unit length. For more detail see [[Curvilinear_coordinates#Covariant_basis|curvilinear coordinates]].
| |
| | |
| Coordinate surfaces, coordinate lines, and [[Basis (linear algebra)|basis vectors]] are components of a '''coordinate system'''.<ref name=Zdunkowski>{{cite book |title=Dynamics of the Atmosphere |page=84 |isbn=052100666X |year=2003 |author=Wilford Zdunkowski & Andreas Bott |publisher=Cambridge University Press |url=http://books.google.com/books?id=GuYvC21v3g8C&pg=RA1-PA84&dq=%22curvilinear+coordinate+system%22&lr=&as_brr=0&sig=ACfU3U2g2k7kY5u-CVcJ1pH5ZxsbEb9Rig }}</ref> If the basis vectors are orthogonal at every point, the coordinate system is an [[Orthogonal coordinates|orthogonal coordinate system]].
| |
| | |
| An important aspect of a coordinate system is its [[Metric (mathematics)|metric]] ''g''<sub>ik</sub>, which determines the [[arc length]] ''ds'' in the coordinate system in terms of its coordinates:<ref name=Borisenko>{{cite book |title=Vector and Tensor Analysis with Applications |author= A. I. Borisenko, I. E. Tarapov, Richard A. Silverman |page=86 |url=http://books.google.com/books?id=CRIjIx2ac6AC&pg=PA86&dq=coordinate+metric&lr=&as_brr=0&sig=ACfU3U1osXaT2hg7Md57cJ9katl3ttL43Q
| |
| |isbn=0486638332 |publisher=Courier Dover Publications |year=1979 }}</ref>
| |
| | |
| :<math>(ds)^2 = g_{ik}\ dx^i\ dx^k \ , </math>
| |
| | |
| where repeated indices are summed over.
| |
| | |
| As is apparent from these remarks, a coordinate system is a [[Model theory|mathematical construct]], part of an [[axiomatic system]]. There is no necessary connection between coordinate systems and physical motion (or any other aspect of reality). However, coordinate systems can include time as a coordinate, and can be used to describe motion. Thus, [[Lorentz transformation]]s and [[Galilean transformation]]s may be viewed as [[Coordinate_system#Transformations|coordinate transformation]]s.
| |
| | |
| General and specific topics of coordinate systems can be pursued following the [[#See also|See also]] links below.
| |
| | |
| ===Observational frames of reference===
| |
| | |
| An '''observational frame of reference''', often referred to as a ''physical frame of reference'', a ''frame of reference'', or simply a ''frame'', is a physical concept related to an [[Observer (special relativity)|observer]] and the observer's state of motion. Here we adopt the view expressed by Kumar and Barve: an observational frame of reference is characterized ''only by its state of motion''.<ref name=Kubar>See {{cite book |author=Arvind Kumar & Shrish Barve |page=115 |title=How and Why in Basic Mechanics |url=http://books.google.com/books?id=czlUPz38MOQC&pg=PA115&dq=%22characterized+only+by+its+state+of+motion%22+inauthor:Kumar&lr=&as_brr=0&sig=ACfU3U36HY3RerJYLWRlfJaGxRw7EqzIeA
| |
| |isbn=8173714207 |year= 2003 |publisher =Orient Longman}}</ref> However, there is lack of unanimity on this point. In special relativity, the distinction is sometimes made between an ''observer'' and a ''frame''. According to this view, a ''frame'' is an ''observer'' plus a coordinate lattice constructed to be an orthonormal right-handed set of spacelike vectors perpendicular to a timelike vector. See Doran.<ref name=Doran>{{cite book |url=http://www.worldcat.org/search?q=9780521715959&qt=owc_search |title=Geometric Algebra for Physicists |author= Chris Doran & Anthony Lasenby |page= §5.2.2, p. 133 |isbn=978-0-521-71595-9 |year=2003 |publisher=Cambridge University Press}}.</ref> This restricted view is not used here, and is not universally adopted even in discussions of relativity.<ref name=Moller>For example, Møller states: "Instead of Cartesian coordinates we can obviously just as well employ general curvilinear coordinates for the fixation of points in physical space.…we shall now introduce general "curvilinear" coordinates ''x''<sup>i</sup> in four-space…." {{cite book |author=C. Møller |title=The Theory of Relativity |page=222 and p. 233 |year=1952 |publisher=Oxford University Press}}</ref><ref name=Lightman>{{cite book |title=Problem Book in Relativity and Gravitation |author=Alan P. Lightman, R. H. Price & William H. Press |page=15 |url=http://books.google.com/books?id=YtxGYnnP1PEC&pg=PA15&dq=relativistic++%22general+coordinates%22&lr=&as_brr=0&sig=ACfU3U28SuvzlWcCJ7PXCY71TVn33GeBvA
| |
| |isbn=069108162X |publisher=Princeton University Press |year=1975 }}</ref> In [[general relativity]] the use of general coordinate systems is common (see, for example, the [[Karl Schwarzschild|Schwarzschild]] solution for the gravitational field outside an isolated sphere<ref name= Faber>{{cite book |title=Differential Geometry and Relativity Theory: an introduction |author=Richard L Faber |url=http://books.google.com/books?id=ctM3_afLuVEC&pg=PA149&dq=relativistic++%22general+coordinates%22&lr=&as_brr=0&sig=ACfU3U1_zMogoRkH1OhzpC77ULTkMN0ihg#PPA211,M1
| |
| |page=211 |isbn=082471749X |year=1983 |publisher=CRC Press }}</ref>).
| |
|
| |
| There are two types of observational reference frame: [[Inertial frame of reference|inertial]] and [[non-inertial reference frame|non-inertial]].
| |
|
| |
| An inertial frame of reference is defined as one in which all laws of physics take on their simplest form. In [[special relativity]] these frames are related by [[Lorentz transformation]]s. In Newtonian mechanics, a more restricted definition requires only that [[Newton's first law]] holds true; that is, a Newtonian inertial frame is one in which a [[free particle]] travels in a [[straight line]] at constant [[speed]], or is at rest. These frames are related by [[Galilean transformation]]s. These relativistic and Newtonian transformations are expressed in spaces of general dimension in terms of [[Representation theory|representations]] of the [[Representation theory of the Poincaré group|Poincaré group]] and of the [[Representation theory of the Galilean group|Galilean group]].
| |
| | |
| In contrast to the inertial frame, a non-inertial frame of reference is one in which [[fictitious force]]s must be invoked to explain observations. An example is an observational frame of reference centered at a point on the Earth's surface. This frame of reference orbits around the center of the Earth, which introduces a fictitious force known as the [[Coriolis force]] (among others).
| |
| | |
| ===Measurement apparatus===
| |
| A further aspect of a frame of reference is the role of the [[metrology|measurement apparatus]] (for example, clocks and rods) attached to the frame (see Norton quote above). This question is not addressed in this article, and is of particular interest in [[Measurement in quantum mechanics|quantum mechanics]], where the relation between observer and measurement is still under discussion (see [[measurement problem]]).
| |
| | |
| In physics experiments, the frame of reference in which the laboratory measurement devices are at rest is usually referred to as the [[laboratory frame]] or simply "lab frame." An example would be the frame in which the detectors for a particle accelerator are at rest. The lab frame in some experiments is an inertial frame, but it is not required to be (for example the laboratory in the surface of the Earth in many physics experiments is not inertial). In particle physics experiments, it is often useful to transform energies and momenta of particles from the lab frame where they are measured, to the [[center of momentum frame]] "COM frame" in which calculations are sometimes simplified, since potentially all kinetic energy still present in the COM frame may be used for making new particles.
| |
| | |
| In this connection it may be noted that the clocks and rods often used to describe observers' measurement equipment in thought, in practice are replaced by a much more complicated and indirect [[metrology]] that is connected to the nature of the [[vacuum]], and uses [[atomic clocks]] that operate according to the [[standard model]] and that must be corrected for [[gravitational time dilation]].<ref name= Wolfson>{{cite book |author= Richard Wolfson |title=Simply Einstein |url=http://books.google.com/books?id=OUJWKdlFKeQC&pg=PA216&dq=%22gravitational+time+dilation+%22&lr=&as_brr=0&sig=ACfU3U0_wc8IuNJdGCLnsaO-SyqXYaRapw
| |
| |page=216 |isbn=0393051544 |publisher=W W Norton & Co. |year=2003 }}</ref> (See [[second]], [[meter]] and [[kilogram]]).
| |
| | |
| In fact, Einstein felt that clocks and rods were merely expedient measuring devices and they should be replaced by more fundamental entities based upon, for example, atoms and molecules.<ref name=Rizzi>See {{cite book |title=Relativity in rotating frames |page=33 |url=http://books.google.com/books?id=_PGrlCLkkIgC&pg=PA226&dq=centrifugal+%22+%22+relativity+OR+relativistic&lr=&as_brr=0&sig=ACfU3U038RpTaZOnfjYn6zH9umefW7y_-Q#PPA33,M1
| |
| |isbn=1402018053 |year=2003 |publisher=Springer |author=Guido Rizzi, Matteo Luca Ruggiero }}.</ref>
| |
| | |
| ==Notes==
| |
| <references/>
| |
The account of this former contributor was not re-activated after the server upgrade of March 2022.
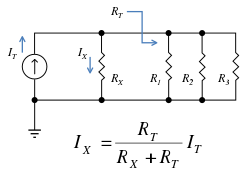
Figure 1: Schematic of an electrical circuit illustrating current division. Notation
RT. refers to the
total resistance of the circuit to the right of resistor
RX.
In electronics, a current divider is a simple linear circuit that produces an output current (IX) that is a fraction of its input current (IT). The splitting of current between the branches of the divider is called current division. The currents in the various branches of such a circuit divide in such a way as to minimize the total energy expended.
The formula describing a current divider is similar in form to that for the voltage divider. However, the ratio describing current division places the impedance of the unconsidered branches in the numerator, unlike voltage division where the considered impedance is in the numerator. To be specific, if two or more impedances are in parallel, the current that enters the combination will be split between them in inverse proportion to their impedances (according to Ohm's law). It also follows that if the impedances have the same value the current is split equally.
Resistive divider
A general formula for the current IX in a resistor RX that is in parallel with a combination of other resistors of total resistance RT is (see Figure 1):

where IT is the total current entering the combined network of RX in parallel with RT. Notice that when RT is composed of a parallel combination of resistors, say R1, R2, ... etc., then the reciprocal of each resistor must be added to find the total resistance RT:

General case
Although the resistive divider is most common, the current divider may be made of frequency dependent impedances. In the general case the current IX is given by:

Using Admittance
Instead of using impedances, the current divider rule can be applied just like the voltage divider rule if admittance (the inverse of impedance) is used.

Take care to note that YTotal is a straightforward addition, not the sum of the inverses inverted (as you would do for a standard parallel resistive network). For Figure 1, the current IX would be

Example: RC combination
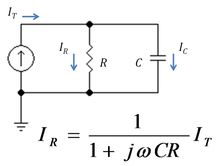
Figure 2: A low pass RC current divider
Figure 2 shows a simple current divider made up of a capacitor and a resistor. Using the formula above, the current in the resistor is given by:


where ZC = 1/(jωC) is the impedance of the capacitor.
The product τ = CR is known as the time constant of the circuit, and the frequency for which ωCR = 1 is called the corner frequency of the circuit. Because the capacitor has zero impedance at high frequencies and infinite impedance at low frequencies, the current in the resistor remains at its DC value IT for frequencies up to the corner frequency, whereupon it drops toward zero for higher frequencies as the capacitor effectively short-circuits the resistor. In other words, the current divider is a low pass filter for current in the resistor.
Loading effect
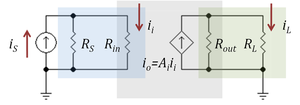
Figure 3: A current amplifier (gray box) driven by a Norton source (
iS,
RS) and with a resistor load
RL. Current divider in blue box at input (
RS,
Rin) reduces the current gain, as does the current divider in green box at the output (
Rout,
RL)
The gain of an amplifier generally depends on its source and load terminations. Current amplifiers and transconductance amplifiers are characterized by a short-circuit output condition, and current amplifiers and transresistance amplifiers are characterized using ideal infinite impedance current sources. When an amplifier is terminated by a finite, non-zero termination, and/or driven by a non-ideal source, the effective gain is reduced due to the loading effect at the output and/or the input, which can be understood in terms of current division.
Figure 3 shows a current amplifier example. The amplifier (gray box) has input resistance Rin and output resistance Rout and an ideal current gain Ai. With an ideal current driver (infinite Norton resistance) all the source current iS becomes input current to the amplifier. However, for a Norton driver a current divider is formed at the input that reduces the input current to

which clearly is less than iS. Likewise, for a short circuit at the output, the amplifier delivers an output current io = Ai ii to the short-circuit. However, when the load is a non-zero resistor RL, the current delivered to the load is reduced by current division to the value:

Combining these results, the ideal current gain Ai realized with an ideal driver and a short-circuit load is reduced to the loaded gain Aloaded:


The resistor ratios in the above expression are called the loading factors. For more discussion of loading in other amplifier types, see loading effect.
Unilateral versus bilateral amplifiers
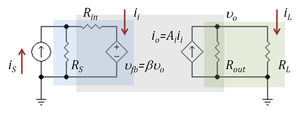
Figure 4: Current amplifier as a bilateral two-port network; feedback through dependent voltage source of gain β V/V
Figure 3 and the associated discussion refers to a unilateral amplifier. In a more general case where the amplifier is represented by a two port, the input resistance of the amplifier depends on its load, and the output resistance on the source impedance. The loading factors in these cases must employ the true amplifier impedances including these bilateral effects. For example, taking the unilateral current amplifier of Figure 3, the corresponding bilateral two-port network is shown in Figure 4 based upon h-parameters.[1] Carrying out the analysis for this circuit, the current gain with feedback Afb is found to be

That is, the ideal current gain Ai is reduced not only by the loading factors, but due to the bilateral nature of the two-port by an additional factor[2] ( 1 + β (RL / RS ) Aloaded ), which is typical of negative feedback amplifier circuits. The factor β (RL / RS ) is the current feedback provided by the voltage feedback source of voltage gain β V/V. For instance, for an ideal current source with RS = ∞ Ω, the voltage feedback has no influence, and for RL = 0 Ω, there is zero load voltage, again disabling the feedback.
References and notes
- ↑ >The h-parameter two port is the only two-port among the four standard choices that has a current-controlled current source on the output side.
- ↑ Often called the improvement factor or the desensitivity factor.



